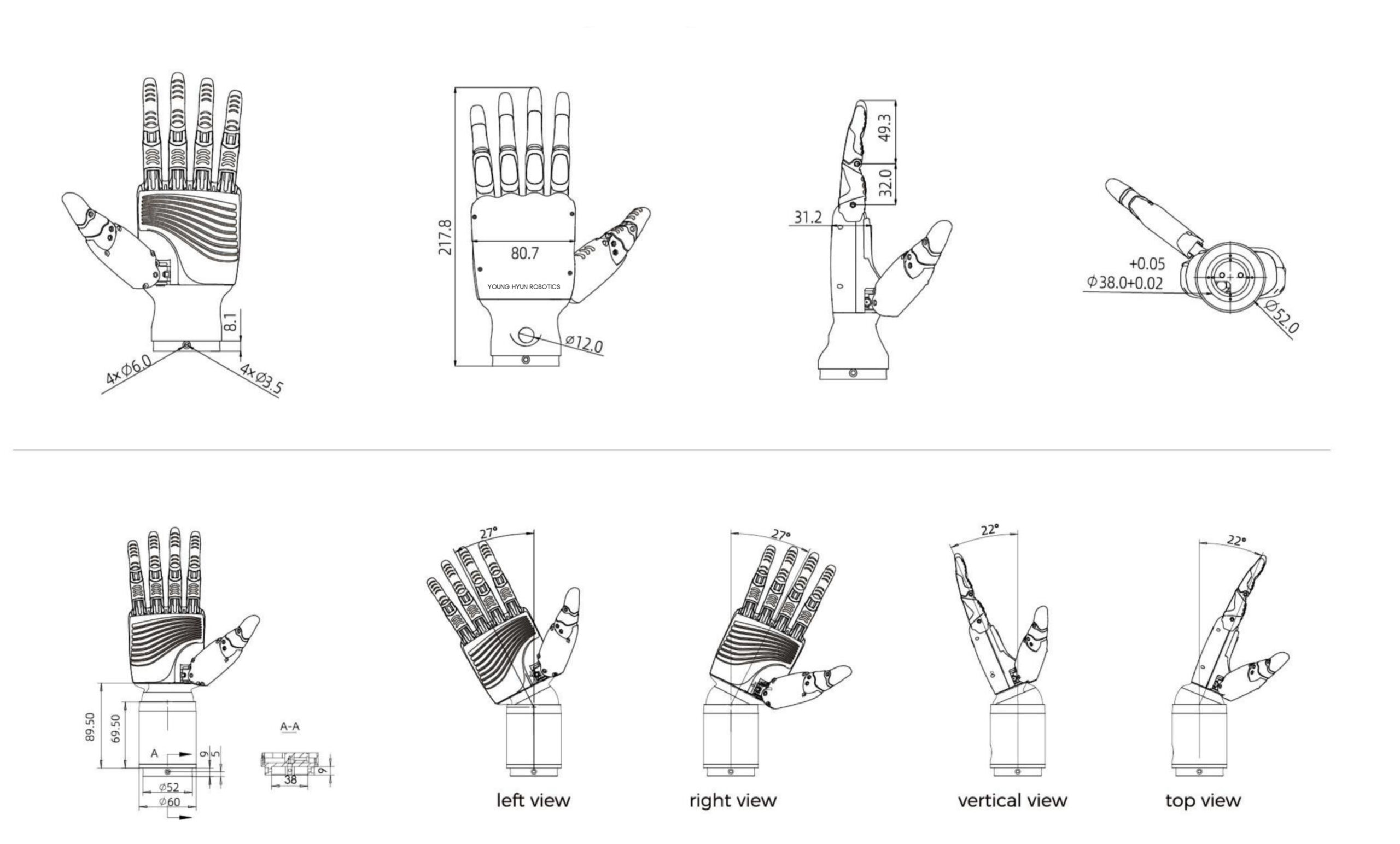
RH56DFX 시리즈는 강력한 출력과 빠른 속도의 최적 조합을 구현한 휴머노이드 5지(五指) 다지 로봇 핸드입니다. 엄지 손가락은 1.5kg의 능동 출력, 나머지 4개 손가락은 각 1kg의 손끝 출력 힘을 제공하여 정밀하면서도 안정적인 파지 동작이 가능합니다. 절대 위치 센서와 힘(Force) 센서를 통합 적용하여 실시간 힘 피드백 제어를 제공하며, 전원 차단 시에도 위치를 유지하는 셀프 락(Self-locking) 기능으로 전원 재인가 시 별도의 위치 변경이나 재설정이 필요 없습니다.
[주요 특징] – 강력한 그립력(Large Grip Force) : 높은 파지력을 기반으로 다양한 물체를 안정적으로 조작 가능
– 소형·경량 설계(Small Size & Light Weight) : 콤팩트한 구조로 다양한 로봇 시스템에 손쉽게 적용 가능
– 힘 센서 내장(Built-in Force Sensor) : 정밀한 파지 제어와 안전한 작업을 위한 실시간 힘 감지 기능 제공
항목
RH56DFX-2L / 2R (손목 미포함)
RH56DFXW-2L / 2R (손목 포함)
모델
RH56DFX-2L (Left hand model)
RH56DFX-2R (Right hand model)
좌측 손 / 우측 손
RH56DFXW-2L (Left hand model)
RH56DFXW-2R (Right hand model)
좌측 손 / 우측 손
손목
없음
포함
제어인터페이스
RS485
RS485
자유도(DOF)
6
6 + 2
관절수
12
12
무게
540g
650g
동작 전압
DC 24V ±10%
DC 24V ±10%
대기전류
0.09 A
0.1 A
최대전류
2 A
2 A
반복 정밀도
±0.20 mm
±0.20 mm
손가락 끝 힘
15 N
15 N
엄지 손가락 끝 힘
10 N
10 N
힘 해상도
0.50 N
0.50 N
엄지 측면 회전 범위
> 65°
> 65°
엄지 측면 회전 속도
107°/s
107°/s
엄지 굽힘 속도
70°/s
70°/s
4손가락 굽힘 속도
260°/s
260°/s
손목 Yaw 회전
해당 없음
±27°
손목 Pitch 회전
해당 없음
±22°
손목 허용 하중 토크
해당 없음
2 Nm (손 무게 제외)
RH56BFX 시리즈
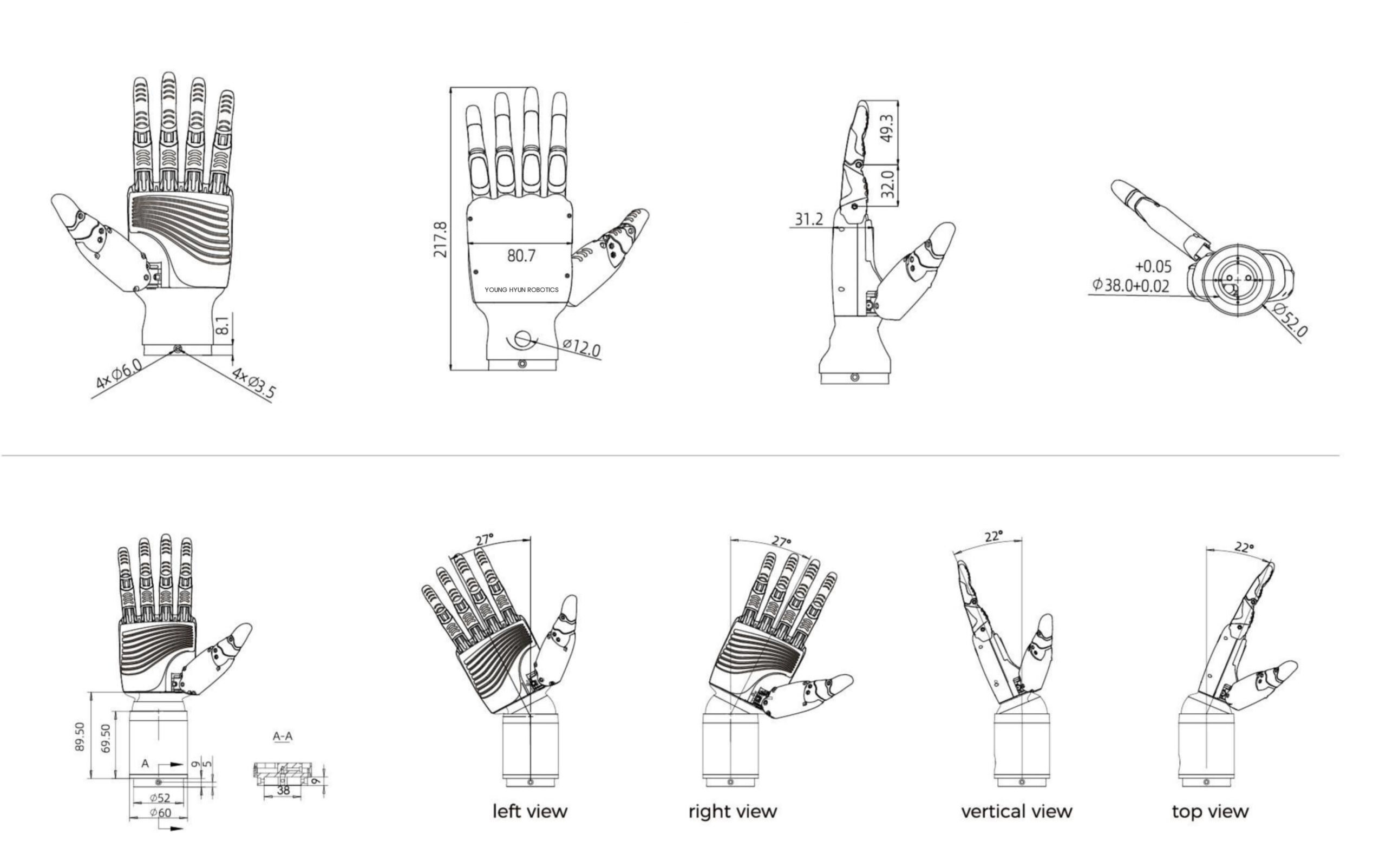
RH56BFX 시리즈는 “피아노 핸드(Piano Hand)”로 불릴 만큼 탁월한 속도를 자랑하는 고속형 다지(多指) 로봇 핸드입니다. 4개의 손가락은 최대 570°/초의 굽힘 속도를 구현하여,비전 기반 가위바위보 게임에서 인간을 상대로 100% 승률을 기록할 수 있는 수준의초고속 반응 성능을 제공합니다. 절대 위치 센서와 힘(Force) 센서를 내장하여 실시간 힘 피드백 제어가 가능하며,전원 차단 시에도 자동으로 위치를 유지하는 셀프 락(Self-locking)기능을 통해전원 재인가 시 별도의 위치 보정이 필요 없습니다.
[주요 특징] – 고속 동작 성능 (High Moving Speed) : 손가락의 초고속 반복 동작이 가능하여 정밀하고 민첩한 작업 수행에 적합
– 소형·경량 설계(Small Size & Light Weight) : 콤팩트한 구조로 다양한 로봇 플랫폼에 손쉽게 적용 가능
– 힘 센서 내장(Built-in Force Sensor) : 정밀한 파지 제어와 안전한 작업을 위한 실시간 힘 감지 기능 제공
항목
RH56BFX-2L / 2R (손목 미포함)
RH56BFXW-2L / 2R (손목 포함)
모델
RH56BFX-2L (Left hand model)
RH56BFX-2R (Right hand model)
좌측 손 / 우측 손
RH56BFXW-2L (Left hand model)
RH56BFXW-2R (Right hand model)
좌측 손 / 우측 손
손목
없음
포함
제어인터페이스
RS485
RS485
자유도(DOF)
6
6 + 2
관절수
12
12
무게
540g
650g
동작 전압
DC 24V ±10%
DC 24V ±10%
대기전류
0.09 A
0.1 A
최대전류
2 A
2 A
반복 정밀도
±0.20 mm
±0.20 mm
손가락 끝 힘
6 N
6 N
엄지 손가락 끝 힘
4 N
4 N
힘 해상도
0.50 N
0.50 N
엄지 측면 회전 범위
> 65°
> 65°
엄지 측면 회전 속도
235°/s
235°/s
엄지 굽힘 속도
150°/s
150°/s
4손가락 굽힘 속도
570°/s
570°/s
손목 Yaw 회전
해당 없음
±27°
손목 Pitch 회전
해당 없음
±22°
손목 허용 하중 토크
해당 없음
2 Nm (손 무게 제외)
RH56E2 시리즈
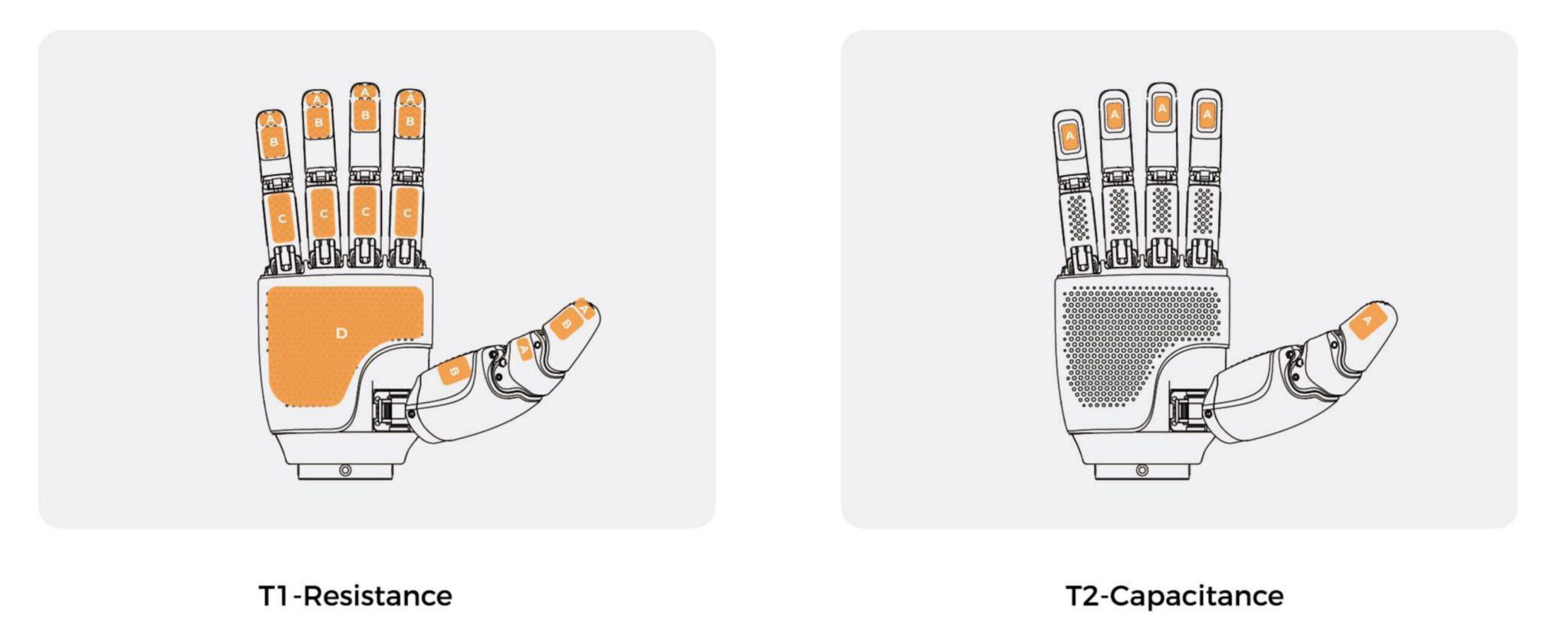
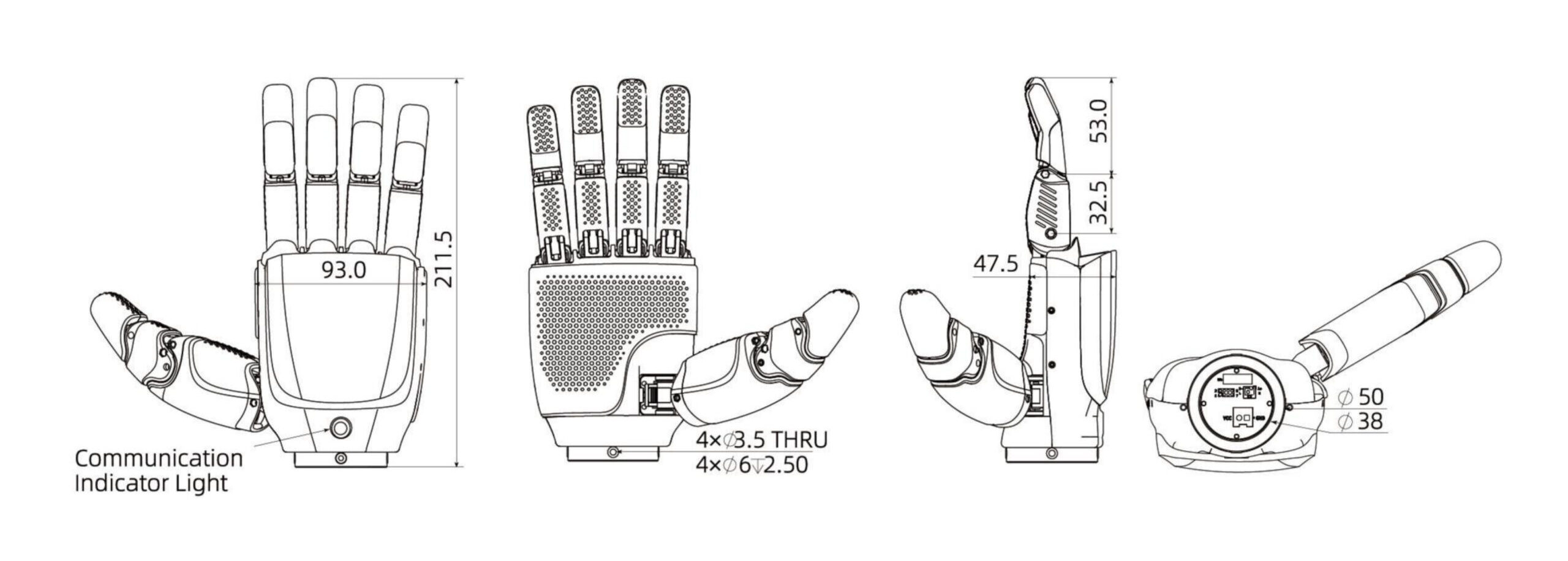
기존의 힘(Force) 센서를 기반으로, 손바닥 전체에 촉각 센서 어레이(Tactile Sensor Array)를 통합 적용하였습니다. 본 업그레이드를 통해 국소적인 촉각 데이터를 실시간으로 획득할 수 있으며, 작업 정밀도가 대폭 향상되었습니다. 손끝 기준 최대 3kg의 출력 힘과 사람 손과 유사한 파지 능력을 제공합니다.
[주요 특징] – 정확한 실시간 촉각 인식 – 수작업에 필적하는 강력한 그립력 – 전원 차단 시에도 안정적이고 신뢰성 있는 셀프 락(Self-locking) 기능
모델
0-CAN, 2-RS485
T1 – 저항형(Resistance)
T2– 정전용량형(Capacitance)